本文简单介绍了用Rayland-DUAL主板控制麦克纳姆车的接线方法和控制协议。
概述

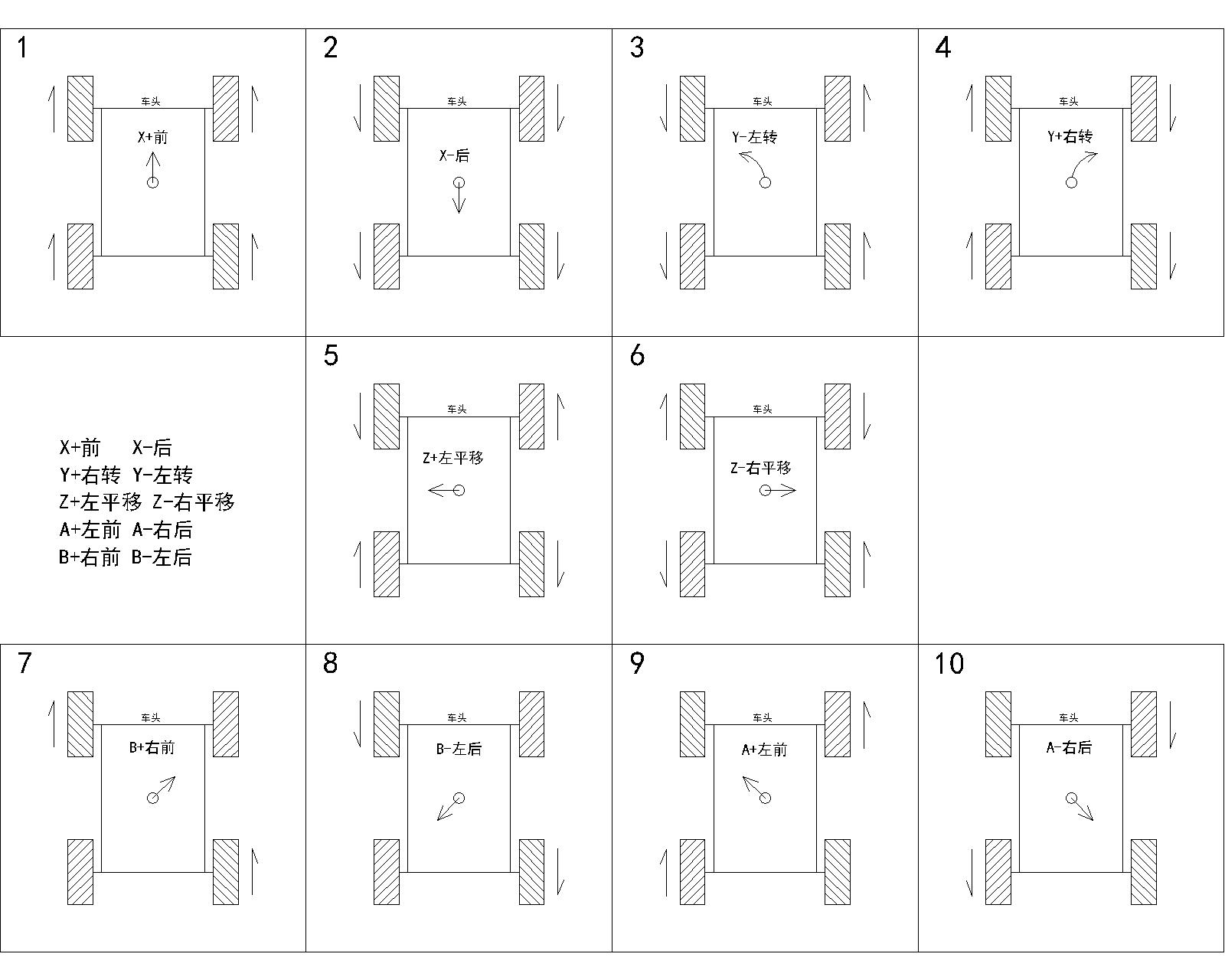
麦克纳姆车是一种很奇特的小车,它搭载了一种全向轮子。由于轮子构造的独特性,这种车可以做出各种奇怪的动作,比如左右平移,斜向运动。以下是这种车能进行的10个运动方向和每个轮子的转动方向之间的关系。
与控制AGV类似,控制麦克纳姆车也有两种控制方式。一个是板载的安卓控制,另一个是用ROS系统控制,利用安卓控制的控制协议如下。
用板载安卓系统控制麦克纳姆车
Android -> Stm32
1.1 控制指令 cmd_type,pkg_length,seq,is_reset,X,Y,Z,A,B,s,v
| Param | Describe | Type | Range | Unit |
|---|---|---|---|---|
| cmd_type | 指令类型 | uint8 | 0 | |
| pkg_length | 包长度 | uint8 | 9bytes |
|
| seq | 指令序号 | uint8 | ||
| is_reset | 是否抢占 | uint8 | 0:false 1:true |
|
| moving_idx | 前后 | uint8 | 0: 前后 1: 旋转 2:平移 3:左上和右下 4: 右上和左下 | |
| s | 行驶里程 | uint16 | 1 = (1/10)r |
|
| v | 行驶速度 | int16 | -500 ~ 500 | (1/10)r/min |
2.2 定义当前坐标 cmd_type,pkg_length,seq,axis_x,axis_y,ori
| Param | Describe | Type | Range | Unit |
|---|---|---|---|---|
| cmd_type | 指令类型 | uint8 | 1 | |
| pkg_length | 包长度 | uint8 | 9bytes |
|
| seq | 指令序号 | uint8 | ||
| axis_x | x轴坐标 | int16 | 1 = (1/10)r |
|
| axis_y | y轴坐标 | int16 | 1 = (1/10)r |
|
| ori | 朝向 | int16 | 1 = 1/10° -1 = -1/10° (逆时针为正) |
3.3 切换控制模式 cmd_type,pkg_length,seq,controll_type
| Param | Describe | Type | Range | Unit |
|---|---|---|---|---|
| cmd_type | 指令类型 | uint8 | 2 | |
| pkg_length | 包长度 | uint8 | 4bytes |
|
| seq | 指令序号 | uint8 | ||
| controll_type | 控制模式 | uint8 | 0:板控 1:遥控 |
Stm32 -> Android
1.1 状态采集
cmd_type,pkg_length,seq,v_x,v_y,axis_x,axis_y,ori,rfid,magn,infra,ut_f,ut_b,moto_state,mile
| Param | Describe | Type | Range | Unit |
|---|---|---|---|---|
| cmd_type | 指令类型 | uint8 | 0 | |
| pkg_length | 包长度 | uint8 | 39bytes |
|
| seq | 指令序号 | uint8 | ||
| v_x | x轴速度 | int16 | -500 ~ 500 | (1/10)r/min |
| v_y | y轴速度 | int16 | -500 ~ 500 | (1/10)r/min |
| axis_x | x轴坐标 | int16 | 1 = (1/10)r |
|
| axis_y | y轴坐标 | int16 | 1 = (1/10)r |
|
| ori | 朝向 | int16 | 1 = 1/10° -1 = -1/10° (逆时针为正) |
|
| rfid | rfid序列号 | uint32 | ||
| magn | 磁条序列号 | uint16 | 0:missing 1:hit |
|
| infra | 红外 | uint8 | 0:false 1:true |
|
| ut_f | 前侧超声 | uint16 * 4 |
mm |
|
| ut_b | 后侧超声 | uint16 * 4 |
mm |
|
| moto_state | 电机状态 | uint8 | 0:stop 1:running 左侧第0位 右侧第一位 |
|
| mile | 总里程 | uint16 | mm |
用ROS系统控制麦克纳姆车
板载的A33处理器并不能运行ROS操作系统,需要通过外接mini PC来完成。MiniPC直接和板子上的STM32进行通讯,在ros模式下,我们需要禁用板载的寻磁传感器功能,将这个口用来做miniPC和STM32的通讯。这里为了调试方便,我们暂时使用了ascii码的方式来做。
MiniPC->STM32
命令是变长的,用字母作为命令头开始,紧接着数字,最后用\n结束,例如向前运动一整圈就是
X10 \n
格式如下
| 命令头 | 数字 | 意义 |
|---|---|---|
| X | -32768~32768 | 前后运动 |
| Y | 同上 | 左右平移 |
| Z | 同上 | 原地旋转 |
| A | 同上 | 左前-右后方向 |
| B | 同上 | 右前-左后方向 |
STM32->MiniPC
命令是变长的,每行含有两个字母S和V,各自接一个数字,最后用\n结束。S后面的数字是当前里程,V后面的数字是当前速度。例如,当前已经以4 centRound/second的速度运行了500 centRound,则输出是
V4 S500 \n
麦克纳姆车硬件接线
| 板上电机端口 | 麦克纳姆功能链接 | 备注 |
|---|---|---|
| X电机端口 | 左前 | 1FR(EN)2BK(MS1)3PG(MS2)4GND(GND) |
| Y电机端口 | 右前 | 1FR(EN)2BK(MS1)3PG(MS2)4GND(GND) |
| E0电机端口 | 左后 | 1FR(EN)2BK(MS1)3PG(MS2)4GND(GND) |
| E1电机端口 | 右后 | 1FR(EN)2BK(MS1)3PG(MS2)4GND(GND) |
电机改成XYZE0
超声接usart2
寻磁接usart3
sv接x_max