本文简单介绍了用Rayland-DUAL主板控制鸵鸟机器人的接线方法和控制协议。
鸵鸟机器人
鸵鸟机器人接线方法
设备 |
个数 |
|---|---|
| RFID | 1 |
| 16通道寻磁 | 1 |
| rayland-dual主板 | 2 |
| 摄像云台舵机 | 2 |
总体接线图
主板
| 板上电机端口 | 鸵鸟功能链接 | 备注 |
|---|---|---|
| X电机端口 | 左轮驱动 | 1FR(EN)2BK(MS1)3PG(MS2)4GND(GND) |
| Y电机端口 | 右轮驱动 | 1FR(EN)2BK(MS1)3PG(MS2)4GND(GND) |
| Z电机端口 | 旋转轴驱动 | 1FR(EN)2BK(MS1)3PG(MS2)4GND(GND) |
| E0电机端口 | 空 | 空 |
| E1电机端口 | 16通道寻磁 | 1GND2TX(STEP)3RX(DIR)4GND |
| USART1 | RFID | 1GND,2TX,3RX,4GND |
| USART2 | 与从板桥接 | 1GND,2TX,3RX,4GND |
| USB口 | USB转网口 |
从板
| 板上电机端口 | 鸵鸟功能链接 | 备注 |
|---|---|---|
| X电机端口 | 滑台前后驱动 | 1FR(EN)2BK(MS1)3PG(MS2)4GND(GND) |
| Y电机端口 | 滑台左右驱动 | 1FR(EN)2BK(MS1)3PG(MS2)4GND(GND) |
| Z电机端口 | 升降轴驱动 | 1FR(EN)2BK(MS1)3PG(MS2)4GND(GND) |
| E0电机端口 | 空 | 空 |
| E1电机端口 | 摄像云台舵机 | 1GND2TX(EN)3RX(MS1)4GND |
| USART2 | 与主板 | 1GND,2TX,3RX,4GND |
远程控制鸵鸟机器人的网络配置
测试时将电脑连接到机器上配备的路由器网络。
1.配置路由器ip地址,将LAN口ip设置改成为10.120.17.1,如下图所示。

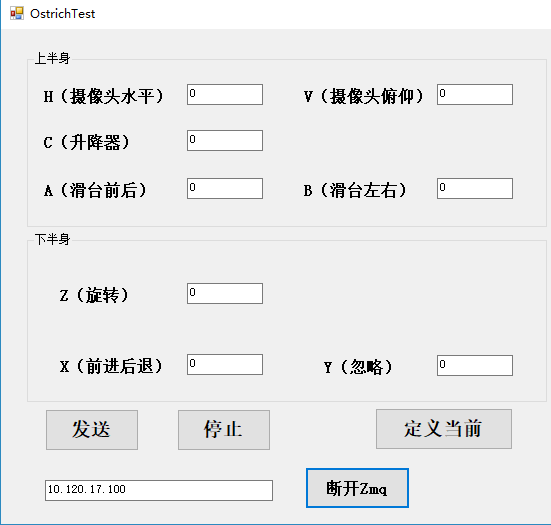
2.打开控制软件ostrich,输入相应的IP地址:10.120.17.100。能正常收发数据后,开始进行遥控测试。